自主式移动运输系统的开发
摘要
自主式移动机器人在柔性物料运输中发挥着重要作用。基于同步定位与地图构建 (SLAM) 功能而开发的移动机器人能够很好地完成地图构建、路径查找和自我优化以及避障等操作,且能高度灵活敏捷地实现工厂物流自动化,从而实现物料自动化仓储和运输的数字化转型。我们对移动机器人导航技术应用进行了研究,并从战略角度开发了解决方案,用于实现水蜘蛛工作流程自动化。
问题陈述
传统的物料运输方式是使用水蜘蛛将物料从物料市场或仓库运输到生产区域。图 1显示 TE 工厂中的常规水蜘蛛工作流程,操作人员正在推/拉装载有成箱物料的拖车。通常情况下,物料不会直接运输到生产线,而是先运送到临时存放区,如图 2 所示.生产线从临时存放区提取物料,如果检查发现没有足够物料来支持此后两小时或更长时间的生产,生产线会在临时存放区设置标签,指示补给物料。物料管理员在看到/收到物料请求后,将检查临时存放区内的物料,然后帮助申请从物料市场采购物料或从仓库补给物料,并分派水蜘蛛来运输物料。显然,传统方法是劳动密集式的且效率低下。此外,一般会有许多不同类型的物料需要管理,需要花费一定的时间才能找到物料,这进一步影响了物料运输的效率。更糟糕的是,人工水蜘蛛可能无法及时响应物料运输的要求,导致生产线等待物料,从而影响生产效率。

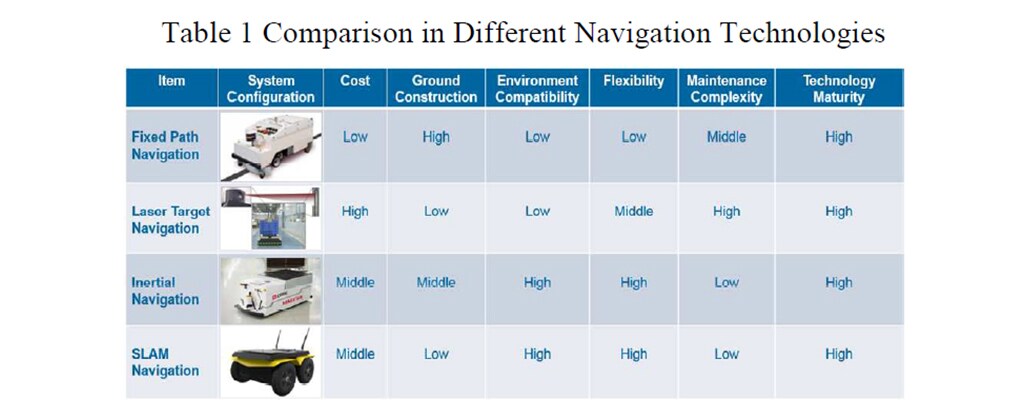
自动化和数字化转型将在很大程度上有助于提高物料运输效率,缩短响应时间。自主式移动机器人能够自动移动,并通过与生产线和 MES 系统的数字连接增强性能,是取代人工水蜘蛛的绝佳替代方案。通常主要有四种不同类型的导航技术:固定路径导航、激光目标导航、惯性导航和 SLAM 导航,如表 1 所示.固定路径导航方法需要制造磁带并粘贴在地板上,用于引导移动机器人随线路移动,移动性和灵活性是几种方法中最低的;激光目标导航依靠激光目标将激光束反射回机器人,实现机器人的精确定位,但环境兼容性较低,激光目标位置被其他障碍物改变或阻挡后,很难精确导航移动机器人;惯性导航需要在地板上安装磁钉或粘贴二维码,它对周围环境的布局变化有更好的兼容性,但只能到达有磁钉或二维码的区域;SLAM 导航能够实时更新地图以查找路径、避障和自主导航,它与环境的兼容性最高,可以灵活地自动移动,最适合用于在需要与人工或其他移动设备频繁互动的生产区域内实现灵活物料运输。表 1对不同的导航技术进行了比较。我们的方向是开发基于 SLAM 导航的 TE 自主式移动运输系统。
方法和结果
新兴移动机器人导航技术
基于定位和环境感知的导航功能是机器人领域中的高级研究课题。一般来说,全局路径规划器善于创建优化路径,但对未知障碍的反应性能不佳。相反,局部/反应式导航方法在动态和未知环境中的应用效果很好,但效率不高,尤其是在复杂环境中[1]。本调研考察了全局路径规划算法和局部路径规划算法,并提出了混合导航方法。
全局路径规划在学术领域已有较为成熟的研究成果,并在实际领域中已有诸多应用。基于图表的算法是其中常见的分支,如 Dijkstra[2],A*[3] 和 Voronoi[4] 图,常用于有界区域。人工势场 (APF)[5] 法使用较多的环境信息,适用于实时导航。
然而,APF 创建的轨迹通常不是最佳轨迹。马尔可夫决策过程是一种概率法,在这种方法中,决策只与最后一个状态有关,与此前许多状态无关。此外,为了找出目标路径,本研究还讨论了其他一些全局路径规划算法[6]。
局部路径规划解决局部环境中的避障问题。由于模型预测控制 (MPC) [7]方法在路径规划上的稳健性和聚合性,越来越多地应用于导航自主式移动机器人。MPC 的核心理念是利用定制模型预测未来,以进行路径规划,然后根据所选轨迹对移动机器人应用初始控制。动态窗口法 (DWA)[8]评估每个轨迹并选择得分最高的轨迹,它是一个独立算法,也是 MPC 的一个组成部分。但是,DWA 假定所有障碍物都是静态的,这不适用于速度相对较高的动态避障。速度障碍及碰撞锥等算法假定障碍物以确定的速度和加速度运动。
显然,在大多数 TE 工厂中,在已知环境中,设备和生产线上的布局相对静态,但设备操作人员的移动不可预测,这些都视为动态障碍,全局路径规划法和局部路径规划法都不适用于移动机器人的导航。为了实现导航,有必要开发一种结合局部路径规划器和全局路径规划器的混合方法。
自主导航的基础 - 地图构建
将自主式移动机器人部署到未知环境中以自动找到到达目标的方法时,机器人必须在整个环境中进行漫游式穿行,直到到达目标。如果环境中增加并设定了一些新的目标,那么每次都命令机器人进行漫游式穿行就是不明智的操作,会导致较高的时间计算成本和空间储存成本。
此外,机器人在整个环境中导航时,目标位置对移动机器人而言是一个相对位置。因此,重要的是要使用环境描述符(如地图)来记录和描述环境信息,让机器人知道目标在哪里,应该往哪里走。有多种描述符可用于实现这一目的
就地图而言,有特征图、拓扑图、网格图和基于外观的方法。特征图使用关键点、线条或平面来描述环境,可形成生动的可视化效果。
拓扑图描述了节点及环境的连接性。基于外观的方法直接计算机器人的形态。网格图会同时考虑环境表示形式的简单性和可视化。因此,网格图作为环境描述符,是导航移动机器人的最佳选择。本部分研究未知环境的地图构建方法,以获取网格图。
在对环境一无所知的情况下,同步定位与地图构建 (SLAM) 功能在跟踪机器人形态的同时创建未知环境的地图,在地图构建中发挥着至关重要的作用。我们的方法为 SLAM 应用了 Rao-Blackwellized 粒子过滤器,以确保地图构建的可靠性和质量。最常见的粒子滤波算法之一是采样重要性重采样 (SIR) 过滤器。使用 Rao-Blackwellized SIR 过滤器的地图构建过程分为以下几个步骤:
- 采样:机器人的当前形态 xt(i) 是通过建议分布 π(xt|z1:t,u0:t) 结合机器人的上一个形态 xt-1(i) 计算得出的
- 重要性权重:每个粒子具有自身的权重,如方程 (1) 所述

- 重采样:为了防止无限粒子并保证算法的收敛性,应减少粒子的数量,并将重要性权值较小粒子替换为重要性权值较大粒子的重采样过程。
- 地图估计:当前地图 mt(i) 是根据历史观察结果 z1:t 和形态 x1:t评估得出的。
因此,Rao-Blackwellized 粒子过滤器的核心理念是计算地图和轨迹的后验概率,如方程 (2) 所示
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
其中,u0:t 是测程法测量值的顺序,包括初始形态,z1:t 是观察结果的顺序,x1:t 描述了潜在轨迹,m 表示地图。
本研究构建了一个仿真环境来验证地图构建算法,如图 3 所示。移动机器人在自由空间移动,环境四周以墙壁作为边界,环境中的盒子代表不同的点位,可以将其看作是障碍。图 3 中所示的蓝色区域 是移动机器人的扫描范围。通过命令移动机器人在此仿真环境中进行漫游式穿行,可基于 SLAM 技术构建网格图,如图 4 所示。.

已知环境中的路径规划
创建可用的环境地图后,通常在地图上将移动机器人的初始位置设置为起点,将目标设置为终点,由此构建机器人的移动路径。通过考虑机器人和周围环境的动态变化,找到从起点到终点的适用路径,并命令机器人沿此路径移动,实现这些操作的功能称为全局路径规划器和局部路径规划器。
在全局路径规划过程中,Dijkstra 算法和 A* 算法是搜索最短路径的两种主要方法,分别采用了宽度优先搜索和深度优先搜索。表 2 简要描述了这两种方法。.
Dijkstra 算法和 A* 算法简介
表 2
| Dijkstra 算法 | A* 算法 |
|---|---|
(1) 在每个节点上设置初始距离值:为起始节点赋值 0,为其他节点赋值无穷大 (2) 将起始节点设置为当前节点,并标记所有其他未访问的节点 (3) 对于当前节点,查找距离已访问节点最近的节点。 (4) 将最近的节点标记为已访问,避免再次查找该节点 (5) 如果已将目标节点标记为已访问,则搜索完成。否则重复步骤 (3) |
(1) 将初始节点设置为当前节点。用 f(n) = g(n) + h(n) 计算其相邻节点的权重,其中 g(n) 是始于起始节点的路径的成本,ℎ(n) 是 n 到目标的估计成本 (2) 将权重最小的节点设置为当前节点,然后继续执行步骤 (1) 的操作 (3) 重复步骤 (1) 和 (2) 直到将目标标识为当前节点 |
无论选择哪种方法,理论上都可以生成适用路径。但是,适用路径并不意味着可执行的路径。局部路径规划器在适用路径和可执行路径之间架起一座桥梁。本研究中采用了动态窗口算法,该算法包括以下步骤:
- 在机器人控制空间中进行离散式采样
- 使用前向估计法预测每个可能的样本会发生什么情况
- 从全局路径距离和重合性的角度评估这些候选轨迹
- 选择得分最高的轨迹
- 清除和重复
就生成可执行路径而言,局部路径规划器在避障方面表现出极大的优势。当移动机器人沿着全局路径移动时,局部观察结果会生成局部地图,以便在局部地图上标记新的/不可预测的障碍物。然后,局部路径规划器将生成一个局部路径,以避开这些障碍物的干扰。在此情况下,机器人可以低速移动以避开静态和动态障碍。
自主导航模拟
按图 3 设置仿真环境,第 II.B 部分中基于 SLAM 算法构建了环境地图。在地图上对路径规划算法进行测试,在此过程中实现并验证 Dijkstra 算法。首先,在地图中配置机器人的当前形态,并将当前形态设置为起始点。
设置目标后,机器人将遵循命令沿着由全局路径规划器规划的路径前进。如图 5 所示,蓝色路径是从起始点到目标的全局路径,而黄色路径是遵循全局路径的局部路径。数轮验证测试结果表明 Dijkstra 法可以生成适用的全局路径
DWA 生成的局部路径可用于构建与全局路径匹配的适用路径。
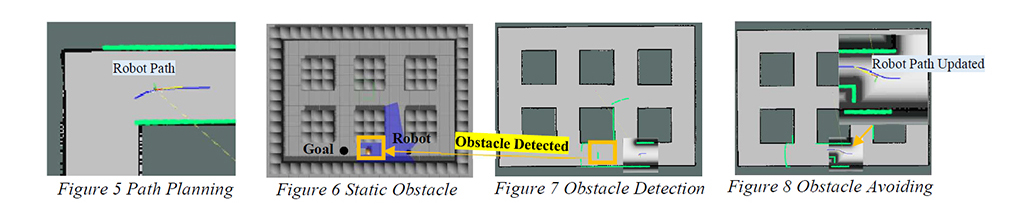
本研究还评估了避障能力。如图 6 所示,一个未在地图上标记的不可预测障碍出现在机器人面前。此障碍在激光扫描器的扫描范围内,并被机器人检测到,如图 7 所示。.为了测试机器人是否能够避开新障碍物的干扰并绕过它,系统在检测到的障碍物正后方设置了一个目标,以测试机器人在遇到不可预测的障碍物时会如何反应来到达目标。
通过运行局部路径规划器生成局部地图,如图 8 所示,局部地图更新障碍物信息后,会显示黄色曲线,这是为避开障碍物而生成的局部路径。可以看到,机器人并没有直接向前移动,受阻于障碍物,而是沿着一条调整后的路径,绕开障碍物移动,而没有与障碍物碰撞。
因此,这里验证了机器人绕过静态障碍物的能力,并进一步在测试中添加了一些动态障碍物,这些障碍物能够以相对较低的速度在地图上移动,它们可能会遇到机器人。测试结果表明,机器人能够使用新生成的局部路径更新原有局部地图,避免与动态障碍物发生碰撞。仿真结果验证了在机器人路径规划和避障功能中将全局路径规划器与局部路径规划器相结合的混合方法。
讨论及要点
自主式移动运输车
第 II 部分中介绍的有关借助 SLAM 进行地图构建和路径规划的新开发出的关键技术经验证,可提升移动机器人的自主导航能力。表 1 中的比较结果显示,基于 SLAM 的导航技术不需要在地面上应用磁带、磁钉或二维码,也不需要将激光目标粘贴到墙壁或固定结构上。它完全有能力自动构建环境地图,并且在机器人可能与未在地图中标记的不可预测的障碍物发生碰撞时,创建合适的路径解决方案。基于 SLAM 的移动机器人是开发自主式移动运输系统的最佳选择。
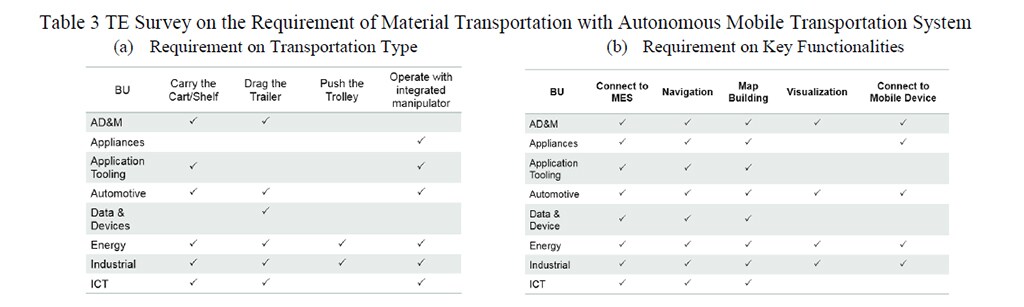
本研究对 TE 各业务部门进行了一项调查,详细了解了各部门对物料自主式移动运输的要求。物料运输的重要方面包括让移动机器人搭载购物车/货架、拖动拖车和集成一个机械手来操作物料,如表 3(a) 所示。自主式移动机器人需要配备的最关键的几个功能包括连接到 MES、自主导航和自动生成地图,如表 3(b) 所示。在所有的期望中,业务部门对使用移动机器人实现水蜘蛛工作流程自动化表现出迫切的需要。如图 9 所示,水蜘蛛流程是
从仓库/物料市场向生产区域运送物料这一过程中最关键的流程。在此,建议开发基于 SLAM 导航技术的伺服自主式移动运输 (AMT) 车辆,并承载货架,以实现灵活的物料运输,如图 10 所示。无人驾驶汽车能够支持超过 300 kg 的有效载荷,并能在工厂以 0.8 ~ 1 m/s 的速度运行。这是一种高效的替代方案,可以替代人工水蜘蛛作业。
自主式移动运输系统
要应用自主式移动运输车,关键是将车辆集成为自主式运输系统 (AMTS) 的一部分,为 TE 工厂开发统包式解决方案。图 9 显示了物料运输的整个过程。通常需要操作人员拆开物料盒,并在
仓库中对物料进行分类,然后将分类的物料运送到存放在物料市场的箱子中,使用人工水蜘蛛将物料从物料市场运输到临时存放区。生产线从临时存放区中提取物料。
考虑到几乎所有 TE 工厂都没有
对仓库到生产线的这一作业流程的任何部分实施自动化,这里首先提出了用自主式移动运输车实现水蜘蛛工作流程的自动化,如图 10 所示。.显然,AMT 车辆提供从物料市场到生产线的端到端物料运输自动化解决方案,AMT 车辆响应快且在物料运输方面效率高,这显著降低了人工成本,节省人工水蜘蛛所需的临时存放空间。
通过让 AMT 车辆以数字方式连接到网络,进一步扩展使用 AMT 车辆的优势。这里还提出了将物料请求过程从手工文字操作转变为数字过程。由于现在经常会看到操作人员/技术人员/工程师使用智能手机,这里建议开发一个应用程序,可安装在移动终端上用于物料请求和通讯,如图 11 所示。.为了通讯的安全性,应用程序和 AMT 车辆以及服务器将连接到 TE 本地网络,只有经过授权的员工才允许登录应用程序或访问系统,提交物料请求、进行通讯以及监控。

因此,这里提出了一个自主式移动运输系统的体系结构,如图 12 所示。所有 AMT 车辆都由 AMTS 中央协调系统管理,用于任务分配、路径规划和交通控制。
应用程序也连接到 AMTS 中央协调系统,生产线通过移动应用程序请求物料后,物料市场的操作人员将收到请求并提前准备物料,之后 AMTS 中央协调系统将指派一辆 AMT 车辆来执行物料
运输任务。AMT 车辆成功地将物料交付到生产线后,操作人员可以点击确认,释放此 AMT 车辆资源供 AMTS 中央协调系统进行规划。
致谢
本研究报告的作者非常感谢来自 Automotive BU 的 Josef Sinder 以及来自 AMT Harrisburg 的 Tim Darr 所提供的建议和说明。作者同时要感谢苏州汽车团队为本研究介绍苏州汽车工厂实施物料运输自动化的要求。
参考文献
[1] Wang, Lim Chee, Lim Ser Yong, and Marcelo H. Ang."Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment."Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on.IEEE, 2002.
[2] Skiena, S. "Dijkstra’s algorithm."Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Path planning with modified A star algorithm for a mobile robot."Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Path planning for mobile robot navigation using voronoi diagram and fast marching."Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on.IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields."Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on.IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev, and Andrey V. Savkin."Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey."Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control."Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard, and Sebastian Thrun."The dynamic window approach to collision avoidance."IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.
自主式移动运输系统的开发
摘要
自主式移动机器人在柔性物料运输中发挥着重要作用。基于同步定位与地图构建 (SLAM) 功能而开发的移动机器人能够很好地完成地图构建、路径查找和自我优化以及避障等操作,且能高度灵活敏捷地实现工厂物流自动化,从而实现物料自动化仓储和运输的数字化转型。我们对移动机器人导航技术应用进行了研究,并从战略角度开发了解决方案,用于实现水蜘蛛工作流程自动化。
问题陈述
传统的物料运输方式是使用水蜘蛛将物料从物料市场或仓库运输到生产区域。图 1显示 TE 工厂中的常规水蜘蛛工作流程,操作人员正在推/拉装载有成箱物料的拖车。通常情况下,物料不会直接运输到生产线,而是先运送到临时存放区,如图 2 所示.生产线从临时存放区提取物料,如果检查发现没有足够物料来支持此后两小时或更长时间的生产,生产线会在临时存放区设置标签,指示补给物料。物料管理员在看到/收到物料请求后,将检查临时存放区内的物料,然后帮助申请从物料市场采购物料或从仓库补给物料,并分派水蜘蛛来运输物料。显然,传统方法是劳动密集式的且效率低下。此外,一般会有许多不同类型的物料需要管理,需要花费一定的时间才能找到物料,这进一步影响了物料运输的效率。更糟糕的是,人工水蜘蛛可能无法及时响应物料运输的要求,导致生产线等待物料,从而影响生产效率。
自动化和数字化转型将在很大程度上有助于提高物料运输效率,缩短响应时间。自主式移动机器人能够自动移动,并通过与生产线和 MES 系统的数字连接增强性能,是取代人工水蜘蛛的绝佳替代方案。通常主要有四种不同类型的导航技术:固定路径导航、激光目标导航、惯性导航和 SLAM 导航,如表 1 所示.固定路径导航方法需要制造磁带并粘贴在地板上,用于引导移动机器人随线路移动,移动性和灵活性是几种方法中最低的;激光目标导航依靠激光目标将激光束反射回机器人,实现机器人的精确定位,但环境兼容性较低,激光目标位置被其他障碍物改变或阻挡后,很难精确导航移动机器人;惯性导航需要在地板上安装磁钉或粘贴二维码,它对周围环境的布局变化有更好的兼容性,但只能到达有磁钉或二维码的区域;SLAM 导航能够实时更新地图以查找路径、避障和自主导航,它与环境的兼容性最高,可以灵活地自动移动,最适合用于在需要与人工或其他移动设备频繁互动的生产区域内实现灵活物料运输。表 1对不同的导航技术进行了比较。我们的方向是开发基于 SLAM 导航的 TE 自主式移动运输系统。
方法和结果
新兴移动机器人导航技术
基于定位和环境感知的导航功能是机器人领域中的高级研究课题。一般来说,全局路径规划器善于创建优化路径,但对未知障碍的反应性能不佳。相反,局部/反应式导航方法在动态和未知环境中的应用效果很好,但效率不高,尤其是在复杂环境中[1]。本调研考察了全局路径规划算法和局部路径规划算法,并提出了混合导航方法。
全局路径规划在学术领域已有较为成熟的研究成果,并在实际领域中已有诸多应用。基于图表的算法是其中常见的分支,如 Dijkstra[2],A*[3] 和 Voronoi[4] 图,常用于有界区域。人工势场 (APF)[5] 法使用较多的环境信息,适用于实时导航。
然而,APF 创建的轨迹通常不是最佳轨迹。马尔可夫决策过程是一种概率法,在这种方法中,决策只与最后一个状态有关,与此前许多状态无关。此外,为了找出目标路径,本研究还讨论了其他一些全局路径规划算法[6]。
局部路径规划解决局部环境中的避障问题。由于模型预测控制 (MPC) [7]方法在路径规划上的稳健性和聚合性,越来越多地应用于导航自主式移动机器人。MPC 的核心理念是利用定制模型预测未来,以进行路径规划,然后根据所选轨迹对移动机器人应用初始控制。动态窗口法 (DWA)[8]评估每个轨迹并选择得分最高的轨迹,它是一个独立算法,也是 MPC 的一个组成部分。但是,DWA 假定所有障碍物都是静态的,这不适用于速度相对较高的动态避障。速度障碍及碰撞锥等算法假定障碍物以确定的速度和加速度运动。
显然,在大多数 TE 工厂中,在已知环境中,设备和生产线上的布局相对静态,但设备操作人员的移动不可预测,这些都视为动态障碍,全局路径规划法和局部路径规划法都不适用于移动机器人的导航。为了实现导航,有必要开发一种结合局部路径规划器和全局路径规划器的混合方法。
自主导航的基础 - 地图构建
将自主式移动机器人部署到未知环境中以自动找到到达目标的方法时,机器人必须在整个环境中进行漫游式穿行,直到到达目标。如果环境中增加并设定了一些新的目标,那么每次都命令机器人进行漫游式穿行就是不明智的操作,会导致较高的时间计算成本和空间储存成本。
此外,机器人在整个环境中导航时,目标位置对移动机器人而言是一个相对位置。因此,重要的是要使用环境描述符(如地图)来记录和描述环境信息,让机器人知道目标在哪里,应该往哪里走。有多种描述符可用于实现这一目的
就地图而言,有特征图、拓扑图、网格图和基于外观的方法。特征图使用关键点、线条或平面来描述环境,可形成生动的可视化效果。
拓扑图描述了节点及环境的连接性。基于外观的方法直接计算机器人的形态。网格图会同时考虑环境表示形式的简单性和可视化。因此,网格图作为环境描述符,是导航移动机器人的最佳选择。本部分研究未知环境的地图构建方法,以获取网格图。
在对环境一无所知的情况下,同步定位与地图构建 (SLAM) 功能在跟踪机器人形态的同时创建未知环境的地图,在地图构建中发挥着至关重要的作用。我们的方法为 SLAM 应用了 Rao-Blackwellized 粒子过滤器,以确保地图构建的可靠性和质量。最常见的粒子滤波算法之一是采样重要性重采样 (SIR) 过滤器。使用 Rao-Blackwellized SIR 过滤器的地图构建过程分为以下几个步骤:
- 采样:机器人的当前形态 xt(i) 是通过建议分布 π(xt|z1:t,u0:t) 结合机器人的上一个形态 xt-1(i) 计算得出的
- 重要性权重:每个粒子具有自身的权重,如方程 (1) 所述
- 重采样:为了防止无限粒子并保证算法的收敛性,应减少粒子的数量,并将重要性权值较小粒子替换为重要性权值较大粒子的重采样过程。
- 地图估计:当前地图 mt(i) 是根据历史观察结果 z1:t 和形态 x1:t评估得出的。
因此,Rao-Blackwellized 粒子过滤器的核心理念是计算地图和轨迹的后验概率,如方程 (2) 所示
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
其中,u0:t 是测程法测量值的顺序,包括初始形态,z1:t 是观察结果的顺序,x1:t 描述了潜在轨迹,m 表示地图。
本研究构建了一个仿真环境来验证地图构建算法,如图 3 所示。移动机器人在自由空间移动,环境四周以墙壁作为边界,环境中的盒子代表不同的点位,可以将其看作是障碍。图 3 中所示的蓝色区域 是移动机器人的扫描范围。通过命令移动机器人在此仿真环境中进行漫游式穿行,可基于 SLAM 技术构建网格图,如图 4 所示。.
已知环境中的路径规划
创建可用的环境地图后,通常在地图上将移动机器人的初始位置设置为起点,将目标设置为终点,由此构建机器人的移动路径。通过考虑机器人和周围环境的动态变化,找到从起点到终点的适用路径,并命令机器人沿此路径移动,实现这些操作的功能称为全局路径规划器和局部路径规划器。
在全局路径规划过程中,Dijkstra 算法和 A* 算法是搜索最短路径的两种主要方法,分别采用了宽度优先搜索和深度优先搜索。表 2 简要描述了这两种方法。.
Dijkstra 算法和 A* 算法简介
表 2
| Dijkstra 算法 | A* 算法 |
|---|---|
(1) 在每个节点上设置初始距离值:为起始节点赋值 0,为其他节点赋值无穷大 (2) 将起始节点设置为当前节点,并标记所有其他未访问的节点 (3) 对于当前节点,查找距离已访问节点最近的节点。 (4) 将最近的节点标记为已访问,避免再次查找该节点 (5) 如果已将目标节点标记为已访问,则搜索完成。否则重复步骤 (3) |
(1) 将初始节点设置为当前节点。用 f(n) = g(n) + h(n) 计算其相邻节点的权重,其中 g(n) 是始于起始节点的路径的成本,ℎ(n) 是 n 到目标的估计成本 (2) 将权重最小的节点设置为当前节点,然后继续执行步骤 (1) 的操作 (3) 重复步骤 (1) 和 (2) 直到将目标标识为当前节点 |
无论选择哪种方法,理论上都可以生成适用路径。但是,适用路径并不意味着可执行的路径。局部路径规划器在适用路径和可执行路径之间架起一座桥梁。本研究中采用了动态窗口算法,该算法包括以下步骤:
- 在机器人控制空间中进行离散式采样
- 使用前向估计法预测每个可能的样本会发生什么情况
- 从全局路径距离和重合性的角度评估这些候选轨迹
- 选择得分最高的轨迹
- 清除和重复
就生成可执行路径而言,局部路径规划器在避障方面表现出极大的优势。当移动机器人沿着全局路径移动时,局部观察结果会生成局部地图,以便在局部地图上标记新的/不可预测的障碍物。然后,局部路径规划器将生成一个局部路径,以避开这些障碍物的干扰。在此情况下,机器人可以低速移动以避开静态和动态障碍。
自主导航模拟
按图 3 设置仿真环境,第 II.B 部分中基于 SLAM 算法构建了环境地图。在地图上对路径规划算法进行测试,在此过程中实现并验证 Dijkstra 算法。首先,在地图中配置机器人的当前形态,并将当前形态设置为起始点。
设置目标后,机器人将遵循命令沿着由全局路径规划器规划的路径前进。如图 5 所示,蓝色路径是从起始点到目标的全局路径,而黄色路径是遵循全局路径的局部路径。数轮验证测试结果表明 Dijkstra 法可以生成适用的全局路径
DWA 生成的局部路径可用于构建与全局路径匹配的适用路径。
本研究还评估了避障能力。如图 6 所示,一个未在地图上标记的不可预测障碍出现在机器人面前。此障碍在激光扫描器的扫描范围内,并被机器人检测到,如图 7 所示。.为了测试机器人是否能够避开新障碍物的干扰并绕过它,系统在检测到的障碍物正后方设置了一个目标,以测试机器人在遇到不可预测的障碍物时会如何反应来到达目标。
通过运行局部路径规划器生成局部地图,如图 8 所示,局部地图更新障碍物信息后,会显示黄色曲线,这是为避开障碍物而生成的局部路径。可以看到,机器人并没有直接向前移动,受阻于障碍物,而是沿着一条调整后的路径,绕开障碍物移动,而没有与障碍物碰撞。
因此,这里验证了机器人绕过静态障碍物的能力,并进一步在测试中添加了一些动态障碍物,这些障碍物能够以相对较低的速度在地图上移动,它们可能会遇到机器人。测试结果表明,机器人能够使用新生成的局部路径更新原有局部地图,避免与动态障碍物发生碰撞。仿真结果验证了在机器人路径规划和避障功能中将全局路径规划器与局部路径规划器相结合的混合方法。
讨论及要点
自主式移动运输车
第 II 部分中介绍的有关借助 SLAM 进行地图构建和路径规划的新开发出的关键技术经验证,可提升移动机器人的自主导航能力。表 1 中的比较结果显示,基于 SLAM 的导航技术不需要在地面上应用磁带、磁钉或二维码,也不需要将激光目标粘贴到墙壁或固定结构上。它完全有能力自动构建环境地图,并且在机器人可能与未在地图中标记的不可预测的障碍物发生碰撞时,创建合适的路径解决方案。基于 SLAM 的移动机器人是开发自主式移动运输系统的最佳选择。
本研究对 TE 各业务部门进行了一项调查,详细了解了各部门对物料自主式移动运输的要求。物料运输的重要方面包括让移动机器人搭载购物车/货架、拖动拖车和集成一个机械手来操作物料,如表 3(a) 所示。自主式移动机器人需要配备的最关键的几个功能包括连接到 MES、自主导航和自动生成地图,如表 3(b) 所示。在所有的期望中,业务部门对使用移动机器人实现水蜘蛛工作流程自动化表现出迫切的需要。如图 9 所示,水蜘蛛流程是
从仓库/物料市场向生产区域运送物料这一过程中最关键的流程。在此,建议开发基于 SLAM 导航技术的伺服自主式移动运输 (AMT) 车辆,并承载货架,以实现灵活的物料运输,如图 10 所示。无人驾驶汽车能够支持超过 300 kg 的有效载荷,并能在工厂以 0.8 ~ 1 m/s 的速度运行。这是一种高效的替代方案,可以替代人工水蜘蛛作业。
自主式移动运输系统
要应用自主式移动运输车,关键是将车辆集成为自主式运输系统 (AMTS) 的一部分,为 TE 工厂开发统包式解决方案。图 9 显示了物料运输的整个过程。通常需要操作人员拆开物料盒,并在
仓库中对物料进行分类,然后将分类的物料运送到存放在物料市场的箱子中,使用人工水蜘蛛将物料从物料市场运输到临时存放区。生产线从临时存放区中提取物料。
考虑到几乎所有 TE 工厂都没有
对仓库到生产线的这一作业流程的任何部分实施自动化,这里首先提出了用自主式移动运输车实现水蜘蛛工作流程的自动化,如图 10 所示。.显然,AMT 车辆提供从物料市场到生产线的端到端物料运输自动化解决方案,AMT 车辆响应快且在物料运输方面效率高,这显著降低了人工成本,节省人工水蜘蛛所需的临时存放空间。
通过让 AMT 车辆以数字方式连接到网络,进一步扩展使用 AMT 车辆的优势。这里还提出了将物料请求过程从手工文字操作转变为数字过程。由于现在经常会看到操作人员/技术人员/工程师使用智能手机,这里建议开发一个应用程序,可安装在移动终端上用于物料请求和通讯,如图 11 所示。.为了通讯的安全性,应用程序和 AMT 车辆以及服务器将连接到 TE 本地网络,只有经过授权的员工才允许登录应用程序或访问系统,提交物料请求、进行通讯以及监控。
因此,这里提出了一个自主式移动运输系统的体系结构,如图 12 所示。所有 AMT 车辆都由 AMTS 中央协调系统管理,用于任务分配、路径规划和交通控制。
应用程序也连接到 AMTS 中央协调系统,生产线通过移动应用程序请求物料后,物料市场的操作人员将收到请求并提前准备物料,之后 AMTS 中央协调系统将指派一辆 AMT 车辆来执行物料
运输任务。AMT 车辆成功地将物料交付到生产线后,操作人员可以点击确认,释放此 AMT 车辆资源供 AMTS 中央协调系统进行规划。
致谢
本研究报告的作者非常感谢来自 Automotive BU 的 Josef Sinder 以及来自 AMT Harrisburg 的 Tim Darr 所提供的建议和说明。作者同时要感谢苏州汽车团队为本研究介绍苏州汽车工厂实施物料运输自动化的要求。
参考文献
[1] Wang, Lim Chee, Lim Ser Yong, and Marcelo H. Ang."Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment."Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on.IEEE, 2002.
[2] Skiena, S. "Dijkstra’s algorithm."Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Path planning with modified A star algorithm for a mobile robot."Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Path planning for mobile robot navigation using voronoi diagram and fast marching."Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on.IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields."Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on.IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev, and Andrey V. Savkin."Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey."Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control."Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard, and Sebastian Thrun."The dynamic window approach to collision avoidance."IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.