
白皮书
传感器融合在倾角传感器中的作用
了解传感器融合在新一代倾角传感器中的关键作用。
简介
倾斜或倾角传感器提供相对于重力的倾角信息。该信息可用于监控设备的状态,或用于控制设备或车辆的特征。不同类型的传感器用于不同的应用。价格低廉的表面贴装倾角传感器在手持技术中越来越受欢迎。它们用于监控握持手机的角度以执行自动旋转功能。又如,游戏机中使用的倾角传感器。
坚固的倾角传感器用于各种工业机械以及道路和非道路车辆和建筑设备。这些传感器用于各种功能,包括行驶控制、驾驶室调平、吊杆倾角测量以及倾翻保护。车辆和建筑设备增加了安全要求,这需要传感器来监控倾斜或倾角,以确保操作人员和附近人员的安全。
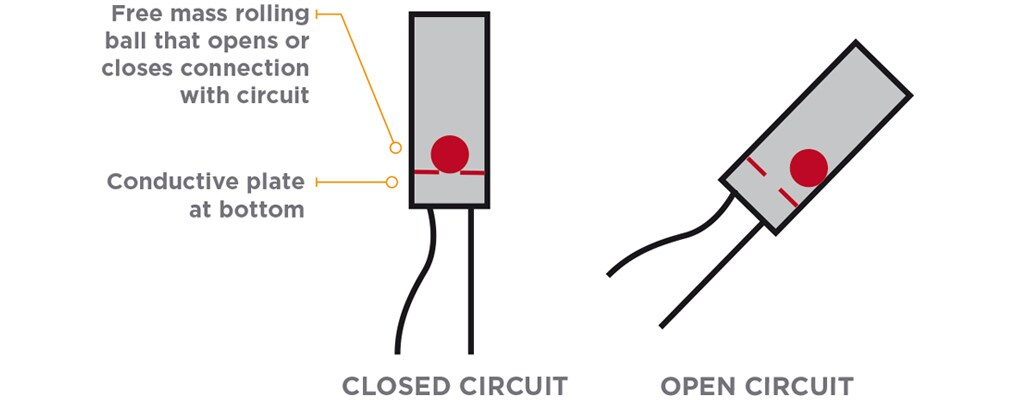
倾角或倾斜传感器技术经过数年发展,已从最初简单的倾角开关变为如今综合多种传感技术的复杂的全电子传感器。多年前,这些设备不是传感器,而是由底部带导电板的滚球组成的开关。这些开关的设计原理是,达到足够倾斜角度后,球滚到底部,与板形成电气连接,该信号然后可作为指示信号,或可用于打开或关闭某设备。
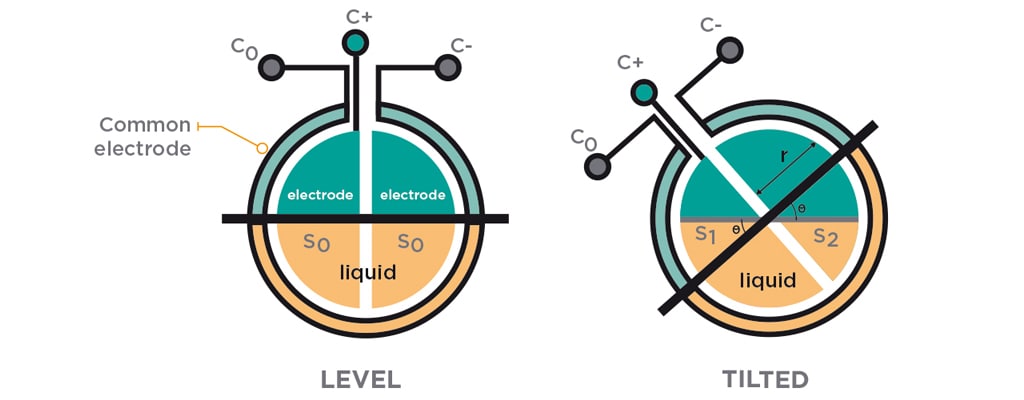
早期的倾角传感器在密封腔内含有电阻或电容液体。当舱向一端或另一端倾斜时,液体流向一侧或另一侧,从而改变内部电路的电阻或电容,而电路输出可被直接监控,或者放大或转换为其他输出格式。尽管这些传感器可以在许多应用中提供准确可靠的倾斜数据,但它们有几个弱点,包括响应慢、易振动和晃动以及寿命有限。
现代倾斜或倾角传感器通常使用微机电系统 (MEMS) 技术。
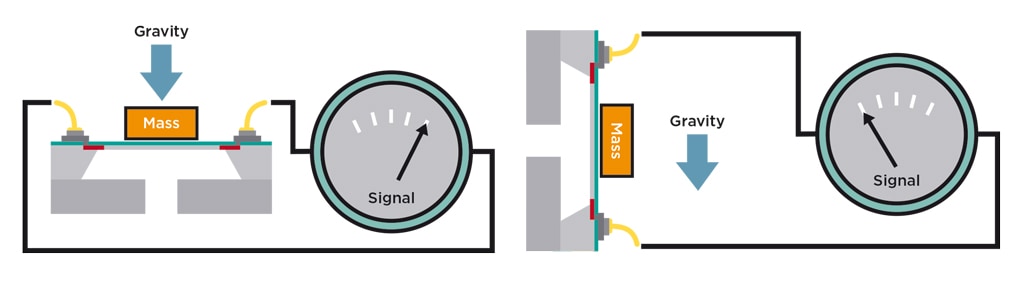
固态 MEMS 是小型传感器,由通过机械悬架系统连接到参考框架的可移动质量板组成。这是一种将机械和电气元件组合在芯片上以生成具有微型尺寸的系统的技术。对于基于 MEMS 的倾角传感器,会在传感器硅芯片中增加一个质量块。在水平位置,重力使芯片挠弯(如施加压力),产生电气输出。当芯片旋转到垂直位置时,芯片上的力变为零,电气输出也变为零。输出是一个 16 位的二补数,表示倾斜角度(以度为单位)。基于 MEMS 的倾角传感器解决了基于液体技术的许多问题。
倾角传感器的功能和精确度受多种因素影响,如重力、温度、倾角传感器刻度、线性度和交叉轴灵敏度等。倾角传感器的一些关键规格:
- 轴数:轴数是一个重要因素,因应用而异。在机器人中,使用双轴倾角传感器。在视频游戏控制器和操纵手柄中,需要三轴倾角传感器。一些智能手机则使用四轴传感器。
- 分辨率:传感器检测到和输出的最小倾角
- 测量范围:传感器可处理的倾角范围。一些传感器的测量能力仅为 10°,而另一些传感器的测量范围可高达 60°、75° 甚至 90°。
- 噪声容差:噪声会导致传感器功能的谐波失真,进而导致输出变化和系统效率降低。
- 振动和冲击:振动会破坏传感器的功能,因此需要采取抗振动措施,尤其是在严苛条件下使用传感器时,例如,在非道路车辆或建筑工地中
此外,区分(准)静态和动态应用也很重要。在动态应用中,传感器受额外加速度影响,而在静态或慢动作应用中,通常可以忽略这些加速度。对于静态倾角传感,常用的传感技术严格基于重力,例如
- 加速度传感器,如今通常为 MEMS 类型
- 充液元件,导电或非导电,提供电子读数
- 带加热器的对流腔
- 带编码器或电位计的摆锤
静态表示车辆未移动,或车辆以恒定速度和方向移动,或加速度非常低。换句话说,它的轨迹是一条理想的直线,例如没有坑洼、没有曲线并且振动也最小。
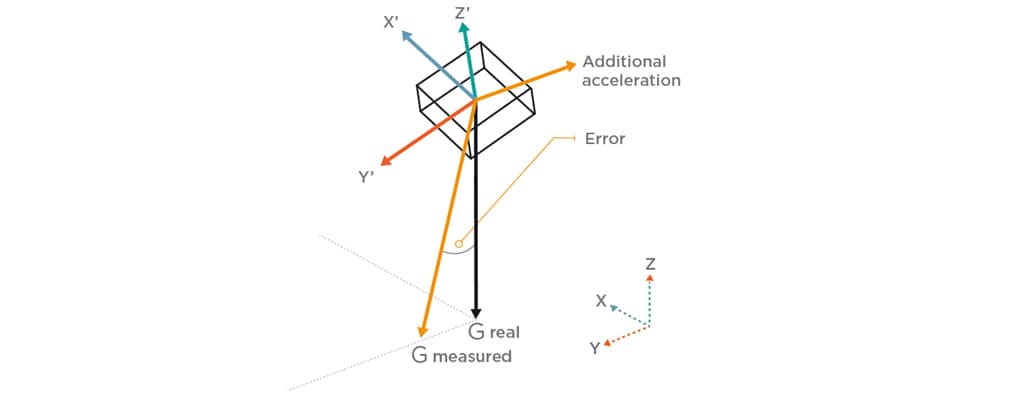
为什么在使用倾角传感器时这很重要?基于 MEMS 的倾角传感器利用重力作为感应元件上的作用力。MEMS 倾角传感器的典型方法包括一个 3 轴加速度传感器,其中重力根据倾斜角度作用于每个轴,信号进行温度补偿和线性化,并且根据 3D 加速度数据计算实际倾斜角度。但是,任何额外的加速度(例如车速变化或坑洼(冲击)或曲线)都会导致计算的倾角变形,因为加速度传感器“看到”额外的加速度。这在所有基于重力的设备中比较常见,并会造成较大错误。
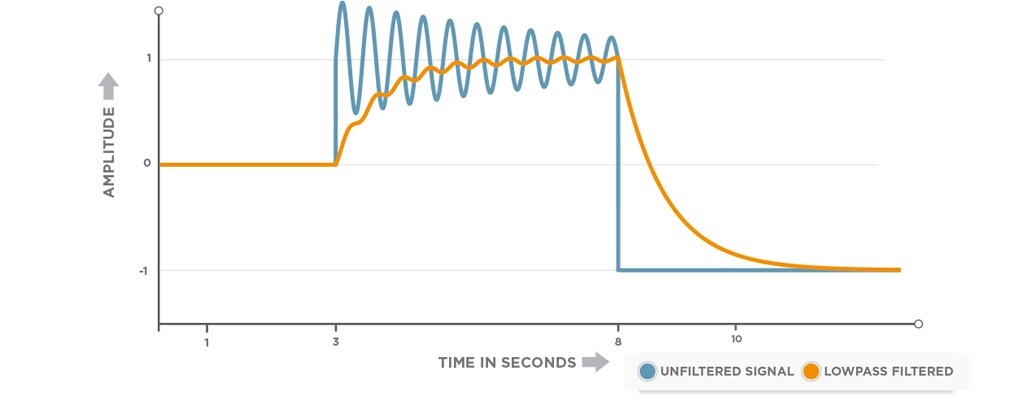
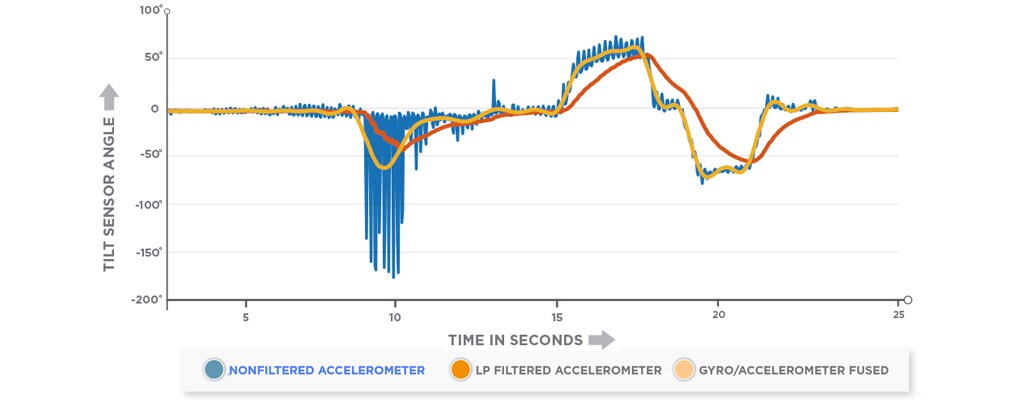
虽然 TE Connectivity (TE) MEMS 倾角传感器在环境温度下提供误差不超过 ±0.15° 的精确度,但额外的加速度可能会导致高达几度的误差。稳定输出的一个常见方法就是使用低通滤波器。所有 TE 倾角传感器都采用该法。中度振动和冲击因此而被充分抑制,并且,在许多应用中,这足以产生良好效果。使用低通滤波器的主要缺点是输出延迟,而且,由于其性质所致,输出跟不上快速的位置变化。这可能在有些应用中不是问题,但在另一些应用中则是。在一些应用中,必须一方面消除由冲击和振动引起的误差,另一方面获得跟随车辆真实方向的输出。在这种情况下,纯重力传感器不是解决方案,无论它如何工作,也无论执行什么类型的滤波或补偿。
传感器融合是关键
这意味着综合不同传感器的信息来计算输出信号。加速度传感器和陀螺仪的组合是一种很好的方法。一个传感器的弱项被另一个传感器的强项补偿。
陀螺仪传感器测量围绕特定轴的旋转速率或角速度。例如,在飞机中,陀螺仪可用于测量围绕飞机滚轴的旋转速率。只要飞机轮子滚动,陀螺仪就会测得非零值,一旦滚动停止,则指示零。这意味着,做 60 度倾斜协调转弯的飞机中的滚动陀螺仪将测得和飞机直线水平飞行一样的零速度。尽管当前滚动角大致等于随着时间推移滚动速率的积分,但不排除有误差。此外,陀螺仪会随时间漂移,而额外误差经过一段时间累积后,最终会让您对于相对地平线的当前滚动角度产生不准确的认识。因此,仅靠陀螺仪传感器不能使飞机或任何车辆或设备保持特定方向。对于大多数动态应用,同时需要加速度传感器和陀螺仪来测量和正确评估倾斜度。
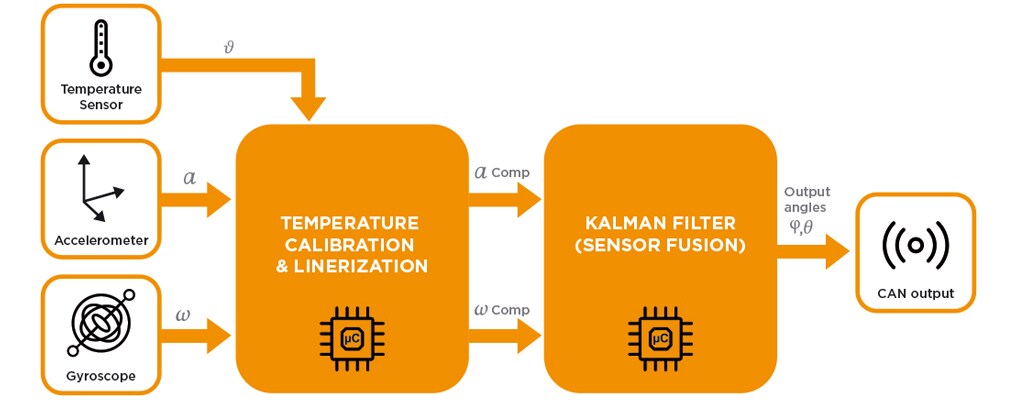
TE 的解决方案 AXISENSE-G 是一款陀螺仪稳定倾角传感器,结合了 3 轴加速度传感器、陀螺仪和温度传感器以及一个复杂的 MCU 和 CAN 总线接口,这些元件全部集成在一个坚固紧凑的封装中。算法从不同传感器获取数据,补偿温度效应,并将它们融合在一起,以产生稳定但快速跟踪的倾斜输出信号。实现传感器信号融合有多种不同方式。
KALMAN 滤波器
TE 决定在扩展实现中使用著名的 Kalman 滤波器来组合传感器数据,并在动态条件下为 AXISENSE-G 倾角传感器提供准确可靠的输出。Kalman 滤波(也称线性二次估计 (LQE))是一种算法,它使用一系列随时间观察到的测量值,其中包含统计噪声和其他误差,并且,它通过估计每个时间期限的变量的联合概率分布,来生成未知变量的估计值,而这些变量往往比仅仅基于单个测量的变量更准确。Kalman 滤波器以该理论的主要开创者之一鲁道夫 E. 卡尔曼 (Rudolf E. Kálmán) 的名字命名。
主要优势
使用陀螺仪稳定倾角传感器的主要好处是,可明显减少由于速度或方向变化以及颠簸和振动而导致的额外短期加速度的负面影响。有时,在谈到熔融位移传感器时,使用“IMU”(惯性测量单元)一词。TE 不使用这个词,因为它通常用于导航场合,而导航具有不同的要求。
AXISENSE-G 倾角传感器侧重抑制短期影响。由于不需要使用全球位置信息,如 GPS 数据,所以,该传感器的体积小巧,易于安装、使用,坚固可靠,极具成本竞争力。此外,TE AXISENSE-G 倾角传感器可以直接替换标准 TE 倾角传感器,无需陀螺仪,因为它们具有相同的安装、形状和功能,并且使用相同的 CAN 总线通信接口。
总结
倾角传感器技术经过多年发展,已经从最初简单的机械设计变为如今较为复杂的充液技术,可在多个角度和多个轴上提供准确可靠的倾斜信息。MEMS 技术允许进一步开发和改进倾角传感器,以提供精确度和分辨率更高且更坚固可靠的固态设计。滤波和温度补偿为广泛的应用提供了更精确的倾角感应,并允许在更动态的应用中使用。但是,在振动和冲击强烈的环境中,传统倾角传感器的表现并不总是足够好。这个问题已通过传感器融合(融合加速度传感器和陀螺仪数据)得到解决,所产生的新一代倾角传感器在动态条件下依旧响应灵敏,但受应用中生成的加速度的影响却更小。

TE Connectivity (TE) 提供下一代倾角传感器。将陀螺仪补偿与 MEMS 传感元件以及先进的滤波功能结合使用时,这种强大组合可产生稳定且高精度的倾角传感器输出,可承受动态和严苛环境考验。观看本视频了解更多详情。

