趋势
使用扭矩传感器提高协作机器人的安全性能
详细了解 TE Connectivity (TE) 的扭矩传感器如何提高协作机器人应用的安全性能。
作者:
TE Connectivity 产品开发工程经理 Arthur Vignolles
TE Connectivity 力和扭矩传感器产品经理 Ricardo Garcia

使用协作机器人提高效率和盈利能力
随着工业 4.0 的发展,以及各公司持续追求提高效率和盈利能力,在工业应用中使用更精密的机 器人以及先进的自动化和控制系统变得越来越普遍。自动化技术的进步推动了协作机器人的发展。 协作机器人是指能够协同工作或与人类一起工作的机器人。这些协作机器人旨在与工人进行交互并 为其提供帮助,而不是作为独立的自动化设备,几乎没有或完全没有人机交互。过去,这种有限的 交互是出于安全考虑以及人类与机器人无法有效协同工作的事实。
如今,协作机器人在工作场所具有更大的灵活性,因为不再需要出于安全目的而使用保护罩,并且协作机器人可与人类无缝协作, 一起执行人类和机器人都无法单独完成的任务。这种灵活性还有助于提高生产率和降低人工成本,从而提高投资回报 (ROI)。这些协 作机器人还可以处理人类无法完成或无法安全执行的复杂或危险任务。例如,协作机器人能够执行精度和稳定性要求超出了最优秀人 类外科医生的能力的手术。在安全方面,协作机器人可以处理有毒材料,并且可在不适合人类的环境中工作。
从产品制造运营到工业包装应用(以及这两个环节之间的整个过程),协作机器人在提高工作场所的生产率方面发挥着重要作用。 随着各公司不断寻找新的方法来集成协作机器人,并且利用协作机器人的优势变得显而易见,协作机器人在工厂和制造设施中的部署 大幅增长。根据国际机器人联合会 (IFR) 发布的《世界机器人报告》,2018 年共安装了 14,000 台协作机器人,比 2017 年增长了 23%。IFR 还预测,到 2020 年,工业机器人安装量将增长约 15%。随着协作机器人使用量的增加,人们开始关注能够确认工作环 境安全并保护与这些协作机器人一起工作的人员的法规。
随着对协作机器人的安全要求愈发成熟和不断扩展,协作机器人中集成了帮助监测和控制协作机器人的技术。其中一个示例是扭矩传 感器,它可监测协作机器人上各种旋转枢轴点的机械扭矩。扭矩传感器基于集成的 MEMS 称重传感器,可以将机械扭矩转换为与施 加的扭矩成正比的数字输出信号。这些扭矩传感器安装在协作机器人内,用于检测协作应用中扭矩值过大,可能造成人身伤害以及可 能对协作机器人本身造成损害的情况。TE Connectivity (TE) 安全扭矩传感器以一件式挠曲件为起点,该挠曲件设计用于将旋转扭 矩转换为机械应变。压阻式应变片连接到挠曲件区域,并采用惠斯通电桥配置,因此机械应变可以转换为 mV/V 输出。两个小 PCB 内含 ASIC 和其他电气元件。原始 mV/V 信号以 I2C 协议进行补偿、放大和数字化,并在总线上传输数据。根据不同应用,可以建 立扭矩阈值,让协作机器人在任何人受伤之前或对协作器人本身造成任何损害之前关闭。
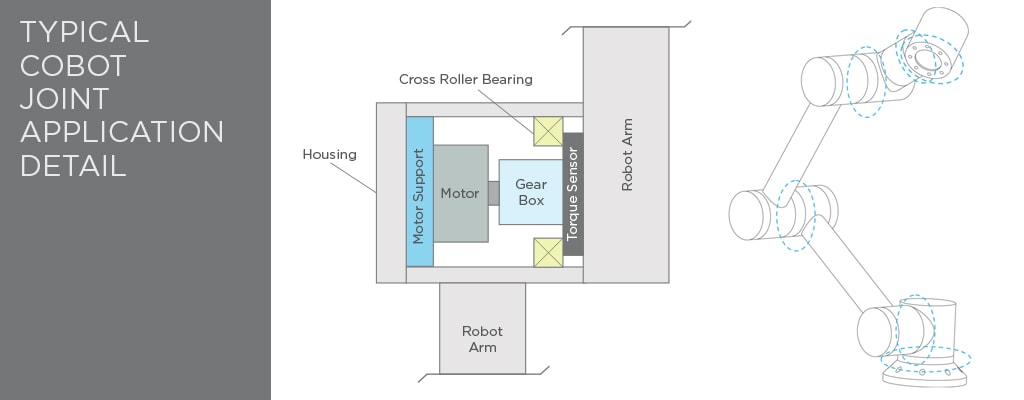
安全扭矩传感器通常集成在协作机器人的关节单元中。关节单元是 一个完整的系统,通常包括一个或多个角度传感器,以及电机和谐 波减速机。关节单元可驱动机器人每个手臂的运动,而扭矩传感器 用于检测电机和谐波减速机内的扭矩。扭矩水平由控制电路用于关 闭关节,以防止对机械臂本身造成损害,或者,如果协作使用,则 防止相应的工人受伤。

在机器人应用中,从使用功率限制系统到使用扭矩传感器的转变是由扭矩传感器为系统提供的优势推动的。扭矩传感器可缩短响应时 间并提高精度,从而提高机器人系统的安全性和可靠性,并提高人员安全性。TE 安全扭矩传感器旨在提供准确的扭矩数据,同时更 大限度减少交叉载荷误差(轴向载荷、径向载荷和倾斜力矩),并可充当谐波减速器中的密封壁。为了符合 ISO13849 类别 4 PL e 的功能安全要求,安全扭矩传感器的设计基于双通道系统,并包含用于检测任何安全相关故障的其他功能。随着协作机器人持续推动 工业 4.0 的发展,TE 的安全扭矩传感器在提高协作机器人的安全性和可靠性方面发挥着重要作用。