趋势
无端子连接
我们的磁传感器可提供精确、可靠的数据 - 无需使用物理连接。
磁传感器
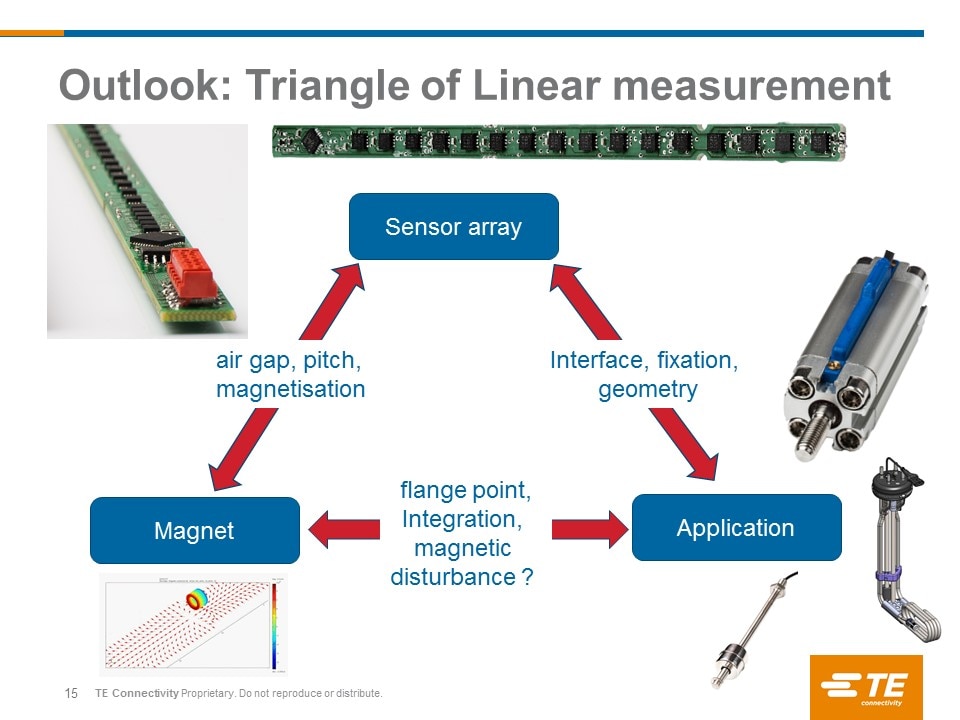
监控温度、压力、张力或流量等属性的传感器会提供与所需参数直接相关的输出信号。另一方面,磁传感器不同于大多数的这类检测器,因为磁传感器通常不是直接测量相关的物理属性,而是检测变化,或者由物体或事件造成或改变的磁场干扰。因此,磁场可能带有与方向、存在状态、旋转、角度或电流等属性相关的信息,而这些信息将由磁传感器转换为电压。少数磁传感器是完全测量磁场,例如指南针中测量地磁场。
输出信号需经过一些信号处理以转换为所需参数。显然,磁场分布取决于产生或干扰磁场的物体(即磁体、电流等)或事件的距离和形式。因此,在应用设计中,应始终考虑传感器和产生磁场的物体这两方面的因素,这一点非常重要。尽管磁传感器的使用难度更大,但却能提供精确、可靠的数据,而且无需使用物理连接。

磁阻效应
历史
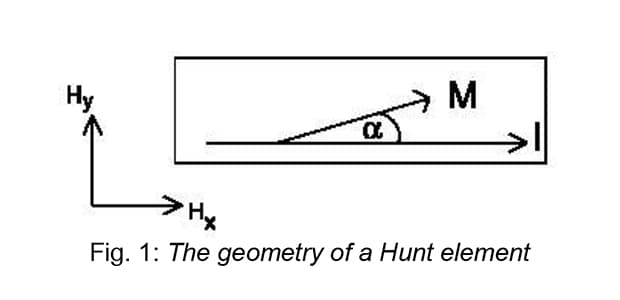
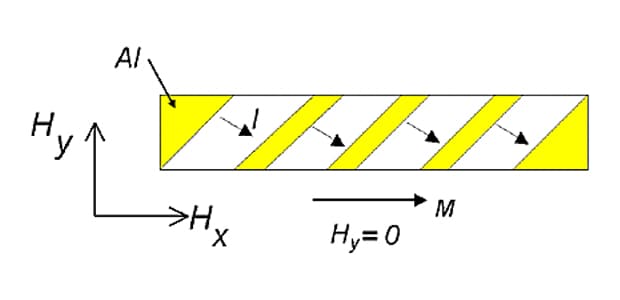
1857 年,Lord Kelvin 将一个铁块放在磁场中,注意到铁块的电阻发生了微弱变化,由此发现了磁阻效应。但直到 100 多年后的 1971 年,才由 Hunt 第一次提出了磁阻 (MR) 传感器的概念。又经过 20 年,到了 1991 年,IBM 公司在硬盘驱动器中引入了第一个 MR 头,使用一条磁阻材料来检测位数。此前,MR 传感器只是用于要求不高的价格标签和标记阅读器(只读)及磁带应用中(1985 年)。亨特元件的几何结构 - 具有感应电流 I 和磁化矢量 M 的磁阻薄膜,与薄膜平面上的电流形成角度 α,以此确定信号(见图 1)。磁场 Hy 耦合到软磁传感器材料中,这将改变由感应电流探测的带条电阻系数。
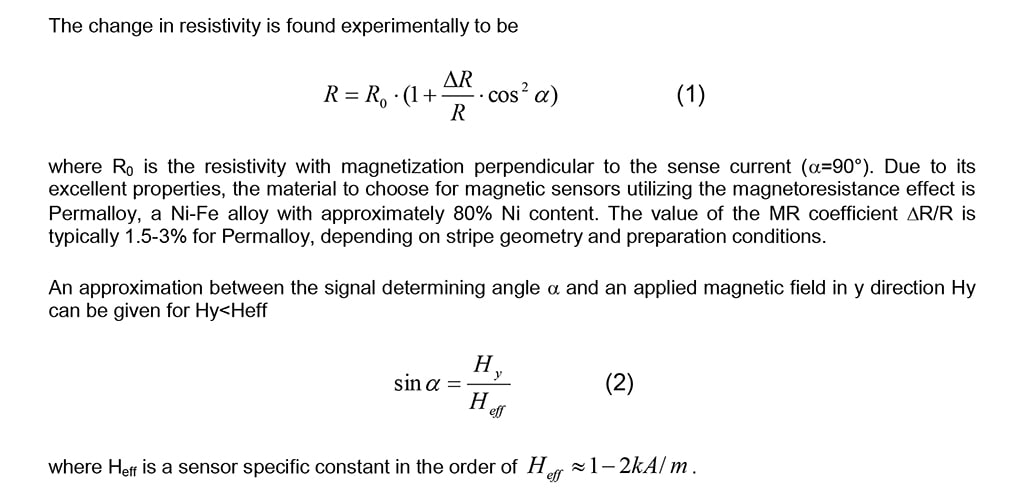
过渡金属中磁阻效应的物理起源在于依赖电子散射的磁化方向。在过渡金属中,主要的电流载体是 4s 电子,因为其迁移率高于 3d 电子。当电子从平行方向迁移到磁化方向时,从 s 到 d 频段的电子散射最高。
惠斯通电桥
在大多数应用中,并不适合使用理论性的亨特元件,因为其不能提供零基准。通过使用惠斯通电桥,可避免这种劣势以及电阻的温度依赖性。
磁场单位
不熟悉磁学知识的普通读者会认为,磁场单位的使用情况相当混乱。下表应该有助于快速找到不同单位之间所用的换算系数:
| 单位 1 | 乘以 | = 单位 2 | 注释 |
|---|---|---|---|
| 特斯拉 | 104 | 高斯 | |
| 奥斯特 |
1 | 高斯 | μr = 1! |
| 奥斯特 | 79.58 | A/m | 103/(4xπ) |
| 韦伯 | 108 | 麦克斯韦 |
表 1:磁场单位的换算系数;有关详细信息,请参阅 NIST 主页。
磁阻传感器
按磁场划分的传感器类型
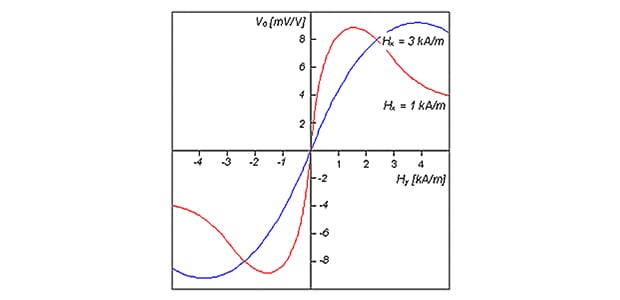
磁阻传感器基本可分为两个类别。在高磁场应用中,例如施加场的磁场强度高到足以使软磁传感器材料达到饱和(约为 H>10 kA/m)时,传感器中的磁化矢量始终(几乎)平行于施加场。磁阻高磁场传感器的一个常见应用是非接触式角度传感器,例如 KMT32B、KMT36H 或 MLS 位移传感器。在低磁场应用中,磁化矢量主要由带条的形式决定,因为磁化显示了纵向流变的自然偏好。外部磁场导致带条中磁化的 α 扭曲,这在 MR 效应的作用下改变了电阻。此模式中通常会使用线性低磁场传感器,例如 MR174B 冲模、KMY 传感器和 MS32 等开关传感器。
MR 传感器
带有线性化传递曲线
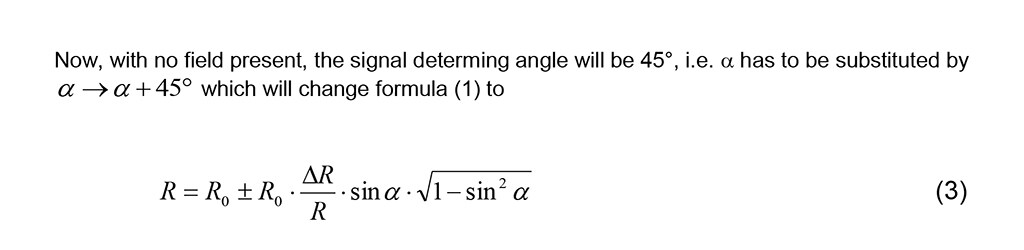
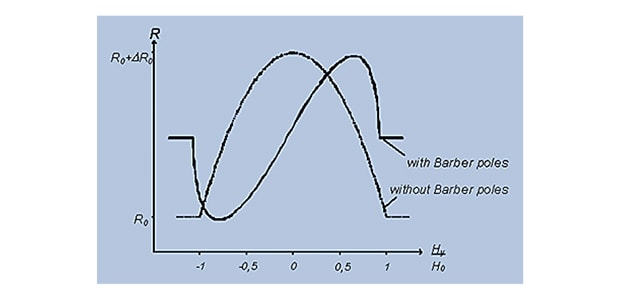
对亨特元件施加低磁场只会引起磁化的轻微变化,反过来公式 (1) 中的余弦项将很难随 α 的轻微变化发生变化。亨特元件对较小的磁场强度不敏感。为了使 MR 传感器能够感应到低磁场,必须修改 MR 传递曲线 (1)。最常用的方式是通过巴伯极来实现(见图 2)。
巴伯极是很小的高导电金属条,放置在坡莫合金的顶部。受几何结构作用,其将对坡莫合金中的电流进行分流并改变电流通路,但并不会改变磁性行为。巴伯极间隙之间的电流将沿最短的通路传递,例如垂直于巴伯极。
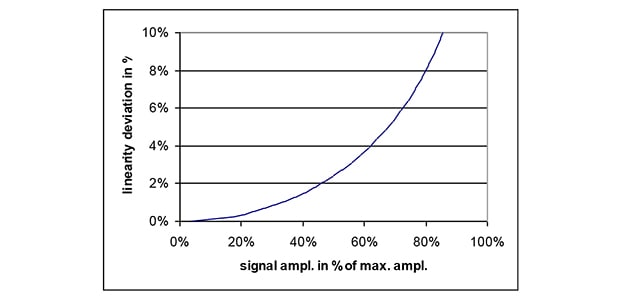
传感器线性
传感器输出信号的线性取决于实信号振幅与最大输出电压振幅之间的关系。图 4 显示了与此商数有关的线性偏差(以百分比表示):
传感器稳定性
无论是平行还是反平行于外部磁场,磁畴的静磁能都是相同的。也就是说,稳态环境下的磁畴可能在两个方向之间摇摆不定。使用高磁场传感器后,就不会出现此问题,因为 α 的传递曲线是二次型。但使用巴伯极传感器时,会产生戏剧性效果,因为现在输出信号也发生了变化。
正因如此,诸如巴伯极传感器之类的低磁场磁阻传感器必须通过外部附加磁场 (Hx) 进行稳定(偏磁),而该外部磁场最好是沿 MR 带条方向(即 X 方向)。该磁场的唯一任务是确定磁畴校准的优先方向。偏磁场必须足够强大,以确保干扰磁场无法转变磁畴。有实证研究发现,偏磁场强度大于2.5 kA/m 左右即可确保传感器保持适当性能。
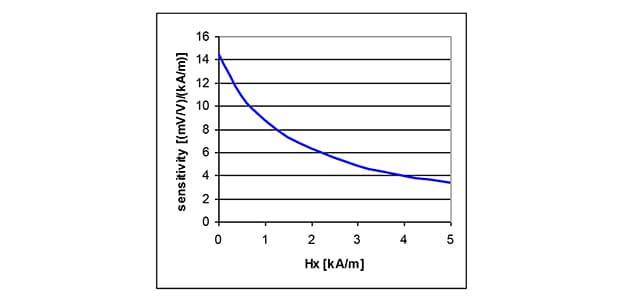
较小的偏磁场
请记住,偏磁场将能改变传感器的灵敏度。这从图 x 和表 x 中可以看出。
某些应用中需要高灵敏度。在这种情况下,可在没有偏磁场的情况下工作。为此,传感器必须预先处理好:测量前,通过所定义 x 方向的短磁脉冲对磁化进行翻转(称为预磁化)。为了避免在预磁化和测量之间的时间内发生带条磁化翻转,必须将外部磁场的强度限制为约小于 0.5 kA/m。
| 偏磁场 Hx (单位:kA/m) |
工作磁场范围 (单位:kA/m) |
灵敏度 S(单位:mV/V/kA/m) | 最大磁场 Hy,最大值 (单位:kA/M) |
注释 |
| 0 | 0.35 | 14 | 0.5 | 需要预磁化 |
| 1 | 0.5 | 10.5 | 0.5 | 需要预磁化 |
| 2 | 1.1 | 6.3 | 1 | 建议预磁化 |
| 3 | 1.4 | 4.9 | ∞ | 稳态 |
| 5 | 2 | 3.4 | ∞ | 稳态 |
表 2:灵敏度和建议工作区域。
永磁体和巴伯极传感器
稳定化 Hx 磁场通常由永磁体产生。使用 KMY20S 或 KMZ20S 时,客户必须通过永磁体来形成所需的偏磁场。KMY20M 和 KMZ20M 都带有内部硬铁氧体磁铁。外部磁场的最大强度只能通过永磁体材料的稳定性进行限制。当使用 KMY20M 和 KMZ20M 类型的传感器时,强度超过约 40 kA/m(500 高斯)的干扰磁场可改变永磁体的磁化方向,而且这种改变是不可逆的。这可导致偏移电压发生永久改变,且传感器功能发生损坏。通过将 S 类型传感器与其他磁体(例如稀土磁体,必须由用户提供)结合使用,可放宽这种限制。
温度
欧姆电阻和磁阻都来源于导电电子的散射过程。所有散射过程都具有温度依赖性,因此电桥电阻和 MR 效应 ∆R/R 也会显示出温度依赖性。温度系数通常与两个温度相关,通过:
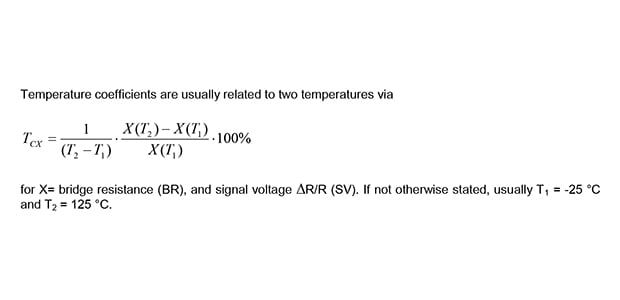
当使用坡莫合金时,电桥电阻和振幅温度系数的值基本相同,但表示符号不同,TCBR≈-TCSV。
因此,用户可以通过使用恒定电流供给来补偿灵敏度的温度依赖性。在这种情况下,电源电压会随着温度和电桥电阻升高而增加。其作用是输出电压增高,从而补偿灵敏度损失。
另一个重要值是偏移的温度系数。该温度系数的形成原因是四个电桥电阻器的温度行为中的细微差别。实际上,可以观察到输出电压偏移,但无法与磁场造成的常规输出信号区分开来。在使用直流信号耦合的应用中,偏移的温度系数将因此能限制测量的准确度。
坡莫合金是一种非常稳固的材料,在有涂层保护的情况下,可承受高达 300°C 左右的超高温度。在这种情况下,包装将成为限制因素。
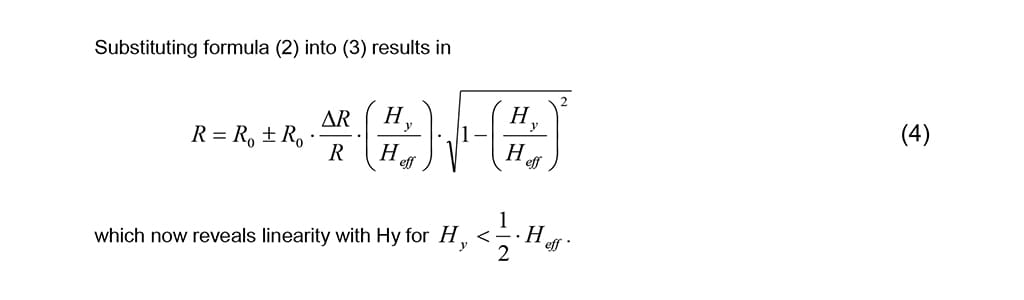
Andreas Voss 详细介绍了磁阻传感器技术和传感器技术的应用领域。