Kontaktlose Verbindung
Unsere magnetischen Sensoren liefern genaue und zuverlässige Daten - ohne physischen Kontakt.
Sensoren zur Überwachung von Eigenschaften wie Temperatur, Druck, Belastung oder Durchfluss liefern ein Ausgangssignal, das sich direkt auf den gewünschten Parameter bezieht. Magnetsensoren hingegen unterscheiden sich von den meisten dieser Messwertgeber dadurch, dass sie die jeweilige physikalische Eigenschaft häufig nicht direkt messen. Sie erkennen Änderungen oder Störungen in Magnetfeldern, die durch Objekte oder Ereignisse entstehen oder beeinflusst werden. Die Magnetfelder können daher Informationen über Eigenschaften wie Richtung, Bewegung, Drehung, Winkel oder Elektrizität enthalten, die vom magnetischen Sensor in elektrische Spannung umgewandelt werden. Nur die wenigsten Magnetsensoren messen Magnetfelder absolut. Hierzu zählt etwa das Erdfeld bei Richtungsbestimmungen.
Um das Ausgangssignal in den gewünschten Parameter zu übersetzen, ist eine Signalverarbeitung erforderlich. Natürlich hängt die Verteilung eines Magnetfeldes von der Entfernung und der Form des Objekts oder Ereignisses ab, das für die Entstehung oder Veränderung verantwortlich ist (z. B. Magnete, Ströme usw.). Beim Anwendungsdesign müssen daher stets der Sensor und das für die Entstehung verantwortliche Objekt berücksichtigt werden. Magnetsensoren sind zwar etwas komplizierter in der Anwendung, liefern dafür aber genaue und zuverlässige Daten – und das ohne physischen Kontakt.
MAGNETORESISTIVER EFFEKT
Der magnetoresistive Effekt der Übergangsmetalle hat seinen physikalischen Ursprung in der Abhängigkeit der Magnetisierungsrichtung von der Streuung der Elektronen. In Übergangsmetallen sind die 4s-Elektronen die vorherrschenden Stromträger, da sie über eine größere Mobilität als die 3d-Elektronen verfügen. Die Streuung der Elektronen von den s- zu den d-Bändern ist am stärksten ausgeprägt, wenn sich die Elektronen parallel zur Magnetisierung bewegen.
Wheatstone-Brücken
Für die meisten Anwendungen ist das akademische Hunt-Element ungeeignet, da es keinen Nullpunkt bietet. Dieser Nachteil sowie die Temperaturabhängigkeit des Widerstands können durch die Verwendung einer Wheatstone-Brücke vermieden werden.
Magnetische Einheiten
Für den Laien in Sachen Magnetismus ist die Situation in Bezug auf die magnetische Einheiten meist recht verwirrend. Die folgende Tabelle soll dabei helfen, schnell Umrechnungsfaktoren für die verschiedenen Einheiten zu finden:
| Einheit 1 | Multiplizieren mit | = Einheit 2 | Bemerkung |
|---|---|---|---|
| Tesla | 104 | Gauß | |
| Oerstedt |
1 | Gauß | μr = 1 ! |
| Oerstedt | 79,58 | A/m | 103/(4xπ) |
| Weber | 108 | Maxwell |
Tabelle 1: Umrechnungsfaktoren für magnetische Einheiten; detaillierte Informationen finden Sie auf der NIST-Homepage.
MAGNETORESISTIVE SENSOREN
Sensortypen nach magnetischem Feld
Magnetoresistive Sensoren können grundsätzlich in zwei Gruppen eingeteilt werden. Bei Hochfeldanwendungen, etwa wenn die Feldstärke des eingesetzten Feldes stark genug ist, um das weiche Magnetsensormaterial zu sättigen (ungefähr für H>10 kA/m), verläuft der Magnetisierungsvektor des Sensor stets (fast) parallel zum eingesetzten Feld. Eine häufige Anwendung für magnetoresistive Hochfeldsensoren sind kontaktlose Winkelsensoren, z. B. die Modelle KMT32B und KMT36H oder der MLS-Positionssensor. Bei Anwendungen mit niedrigem Feld wird der Magnetisierungsvektor hauptsächlich durch die Form der Streifen bestimmt, da die Magnetisierung eine natürliche Präferenz für die Längsrichtung aufweist. Das externe Feld bewirkt eine Verdrehung α der Magnetisierung im Streifen, wodurch sich der Widerstand aufgrund des MR-Effekts verändert. Lineare Niederfeldsensoren wie der MR174B-Chip, die KMY-Sensoren und Schaltsensoren wie der MS32 arbeiten in der Regel in diesem Modus.
MR-Sensoren
mit linearisierter Übertragungskennlinie
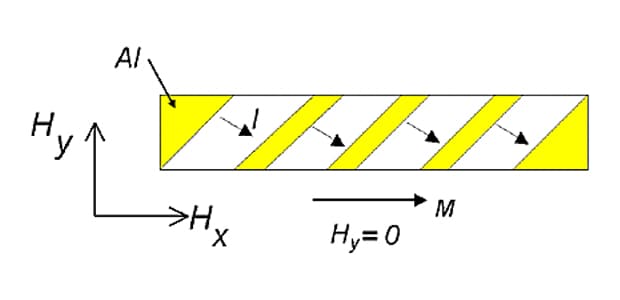
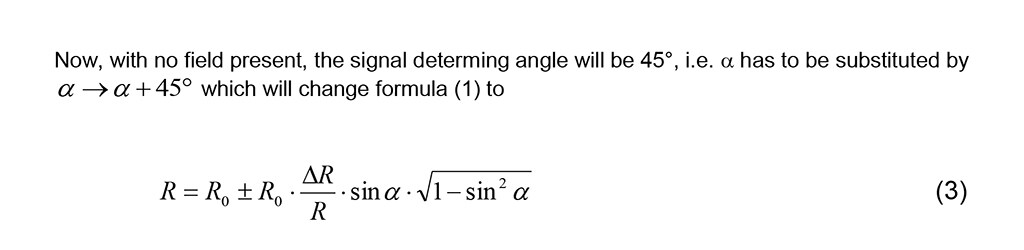
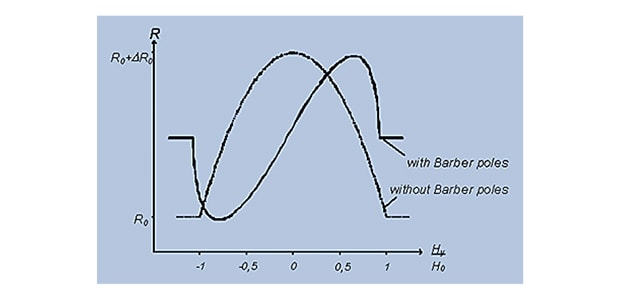
Die Anwendung schwacher Magnetfelder auf ein Hunt-Element führt nur zu geringen Änderungen der Magnetisierung, sodass sich der Term cos in Formel (1) bei kleinen Änderungen von α kaum verändert. Ein Hunt-Element ist für kleine Feldstärken nicht empfindlich. Um den MR-Sensor für niedrige Magnetfelder empfindlich zu machen, muss die MR-Übertragungskennlinie (1) abgewandelt werden. Dies wird in der Regel mithilfe von sogenannten Barberpoles erreicht (siehe Abbildung 2).
Kleine, hochleitfähige Stäbe – die sogenannten „Barber Poles“ – werden auf das Permalloy aufgebracht. Sie werden den Strom im Permalloy umleiten und aufgrund ihrer Geometrie den Strompfad verändern, jedoch nicht das magnetische Verhalten beeinflussen. Der Strom zwischen den Barberpole-Lücken sucht sich den kürzesten Weg, z. B. lotrecht zu den Barberpoles.
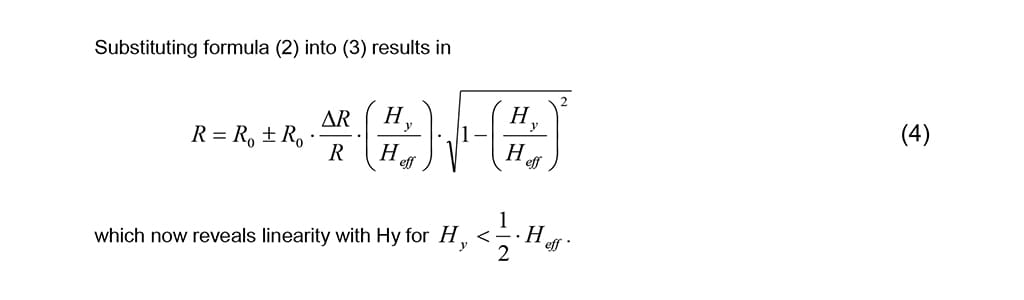
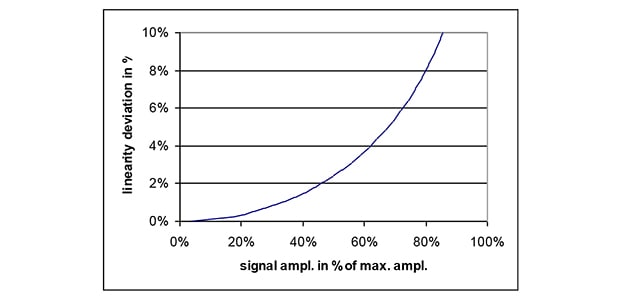
Sensorlinearität
Die Linearität des Sensorausgangssignals richtet sich nach dem Verhältnis der tatsächlichen Signalamplitude zur maximalen Ausgangsspannungsamplitude. Abbildung 4 zeigt die Linearitätsabweichung im Verhältnis zu diesem Quotienten (in Prozent):
Sensorstabilität
Egal, ob eine magnetische Domäne parallel oder antiparallel zum externen Feld verläuft, die magnetostatische Energie ist die gleiche. In anderen Worten: magnetische Domänen können in einer stabilen Umgebung zwischen zwei Richtungen fluktuieren. Bei Hochfeldsensoren stellt das kein Problem dar, da die Übertragungskennlinie in α quadratisch ist. Bei Barberpole-Sensoren ergeben sich jedoch erhebliche Auswirkungen, da nun das Ausgangssignal auch das Vorzeichen wechselt.
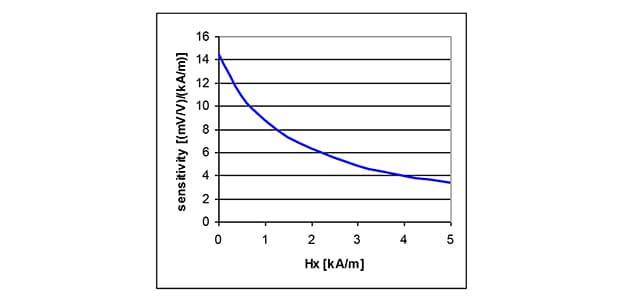
Aus diesem Grund müssen magnetoresistive Sensoren mit niedrigem Feld, wie der Barberpole-Sensor, durch ein externes Zusatzfeld (Hx) stabilisiert (vorgespannt) werden, das günstig entlang des MR-Streifens (d. h. in x-Richtung) ausgerichtet ist. Die einzige Aufgabe dieses Feldes besteht darin, eine Vorzugsrichtung für die Ausrichtung der magnetischen Domänen zu definieren. Das Vorspannfeld muss stark genug sein, um zu verhindern, dass Störfelder die Domänen umschalten. Die Erfahrung zeigt, dass vormagnetisierte Felder mit einer Stärke von mehr als ca. 2,5 kA/m eine angemessene Sensorleistung gewährleisten.
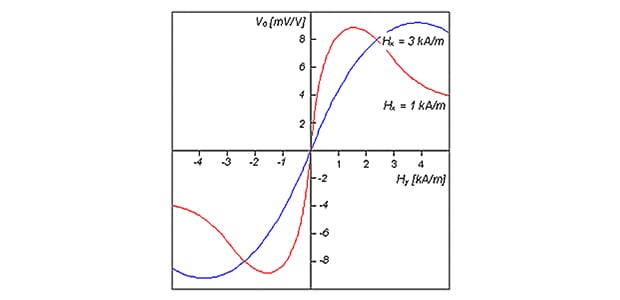
Kleinere Verzerrungsfelder
Beachten Sie jedoch, dass ein vormagnetisiertes Feld die Empfindlichkeit des Sensors verändert. Dies ist in Abbildung 6 und in Tabelle 2 dargestellt.
Bei einigen Anwendungen ist eine hohe Empfindlichkeit wünschenswert. In diesem Fall kann ohne vormagnetisiertes Feld vorgegangen werden. Dazu muss der Sensor gut vorkonditioniert werden: Unmittelbar vor der Messung wird die Magnetisierung durch einen kurzen magnetischen Impuls in einer definierten x-Richtung umgedreht (Vormagnetisierung). Um eine Umkehrung der Streifenmagnetisierung zwischen Vormagnetisierung und Messung zu verhindern, müssen externe Felder auf weniger als ca. 0,5 kA/m begrenzt werden.
| Vorspannfeld Hx in kA/m |
Betriebsfeldbereich in kA/m |
Empfindlichkeit S in mV/V/kA/m | Max Feld Hy,max in kA/M |
Bemerkung |
| 0 | 0,35 | 14 | 0,5 | Vormagnetisierung erforderlich |
| 1 | 0,5 | 10,5 | 0,5 | Vormagnetisierung erforderlich |
| 2 | 1,1 | 6,3 | 1 | Vormagnetisierung empfohlen |
| 3 | 1,4 | 4,9 | ∞ | Stabil |
| 5 | 2 | 3,4 | ∞ | Stabil |
Tabelle 2: Empfindlichkeit und empfohlener Einsatzbereich.
Dauermagnete und Barberpole-Sensoren
Das stabilisierende Hx-Feld wird in der Regel durch einen Dauermagneten erzeugt. Bei den Modellen KMY20S oder KMZ20S muss der Kunde das erforderliche Vorspannfeld mit einem Dauermagneten erzeugen. KMY20M und KMZ20M sind mit einem internen Hartferrit-Magneten ausgestattet. Die maximale externe Feldstärke wird nur von der Stabilität des Materials des Dauermagneten begrenzt. Bei den Modellen KMY20M und KMZ20M können Störfelder mit mehr als ca. 40 kA/m (500 Gauß) die Magnetisierungsrichtung des Dauermagneten unumkehrbar ändern. Dies kann zu einer dauerhaften Änderung der Offsetspannung und zur Zerstörung der Sensorfunktion führen. Diese Einschränkung kann durch die Verwendung von S-Typ-Sensoren in Kombination mit anderen Magneten, wie z.B. Seltenerdmagneten, die vom Benutzer bereitgestellt werden müssen, erweitert werden.
Temperatur
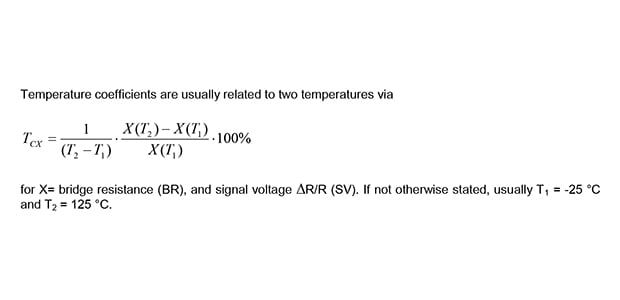
Sowohl der ohmsche Widerstand als auch der magnetoresistive Effekt haben ihren Ursprung in den Streuungsprozessen der leitenden Elektronen. Da alle Streuprozesse temperaturabhängig sind, zeigen auch der Brückenwiderstand und der MR-Effekt ∆R/R eine Temperaturabhängigkeit. Temperaturkoeffizienten sind in der Regel mit zwei Temperaturen verbunden über:
Bei Permalloy haben sowohl der Brückenwiderstand als auch der Amplitudentemperaturkoeffizient ungefähr denselben Wert, unterscheiden sich jedoch im Vorzeichen: TCBR≈-TCSV.
Dadurch kann die Temperaturabhängigkeit der Empfindlichkeit durch eine konstante Stromversorgung ausgeglichen werden. In diesem Fall nimmt die Versorgungsspannung mit steigender Temperatur und wachsendem Brückenwiderstand zu. Dieser Effekt sorgt für eine steigende Ausgangsspannung, die den Empfindlichkeitsverlust ausgleicht.
Ein weiterer wichtiger Wert ist der Temperaturkoeffizient des Ausgleichs. Dieser Temperaturkoeffizient ergibt sich durch kleine Abweichungen des Temperaturverhaltens der vier Brückenwiderstände. In der Praxis wird eine Drift der Ausgangsspannung beobachtet, die nicht von dem regulären, durch Magnetfelder verursachten Ausgangssignal getrennt werden kann. In Anwendungen mit DC-Signalkopplung begrenzt daher der Temperaturkoeffizient des Ausgleichs die Messgenauigkeit.
Permalloy ist ein äußerst robustes Material, das mit einer Beschichtung geschützt sehr hohen Temperaturen von bis zu ca. 300 °C standhalten kann. In diesem Fall ist die Verpackung der begrenzende Faktor.

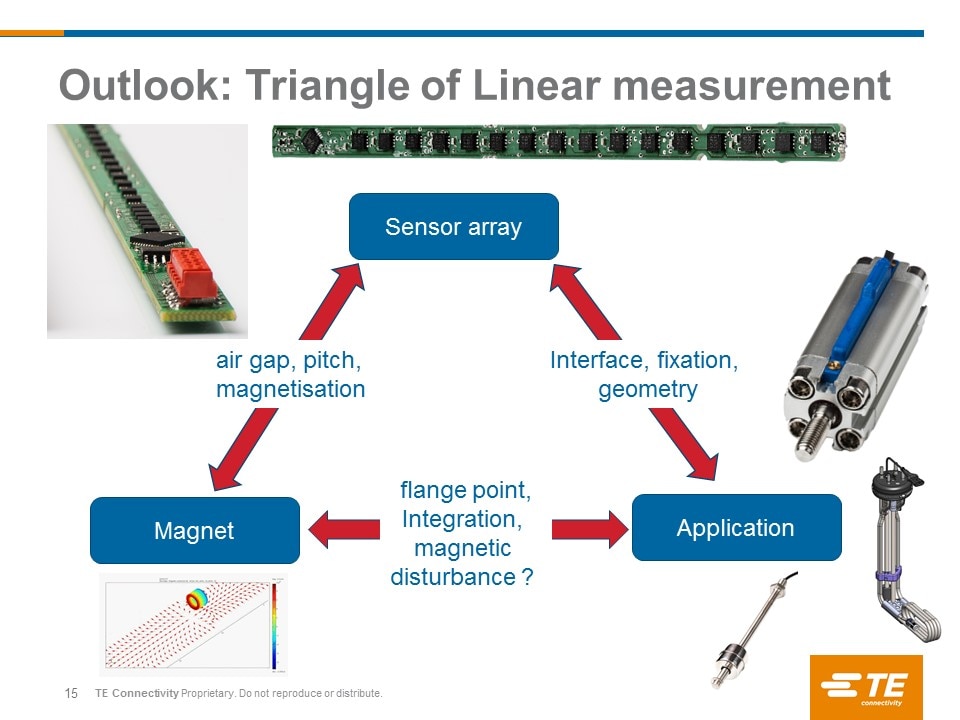
Andreas Voss präsentiert Einzelheiten und Einsetzmöglichkeiten zur magnetoresistiven Sensortechnologie.